Human-in-the-Loop Driving Simulator
The motivation behind the development of a human-in-the-loop (HiL) driving simulator is to create a platform that allows for the collection of naturalistic driving data in a controlled environment. This is crucial for advancing the research and development of personalized motion control systems that consider individual driving styles and their impact on energy consumption, especially in the context of automated eco-driving. The significance of such a simulator lies in its ability to replicate realistic driving scenarios without the limitations and risks associated with real-world data collection, such as uncontrollable environmental factors and safety concerns. The HiL simulator enables researchers to gather comprehensive data across various driving conditions, which is essential for improving driver behavior modeling, enhancing the efficiency of autonomous driving systems, and ultimately contributing to safer and more sustainable transportation solutions.

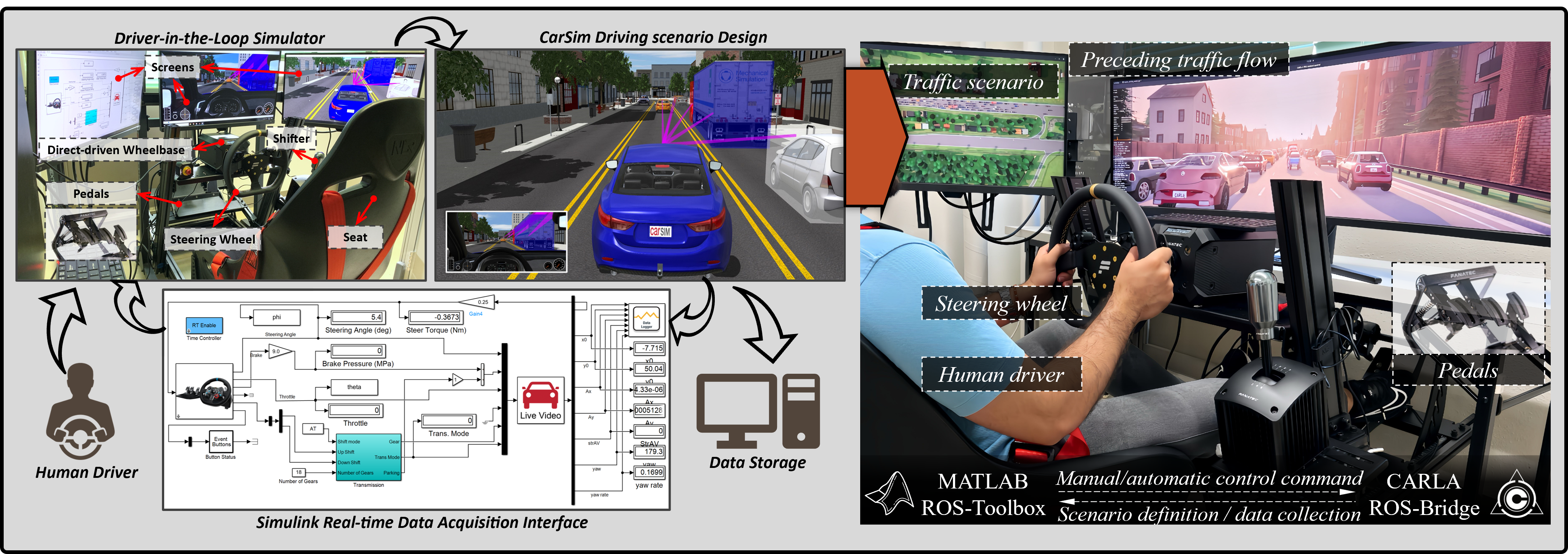
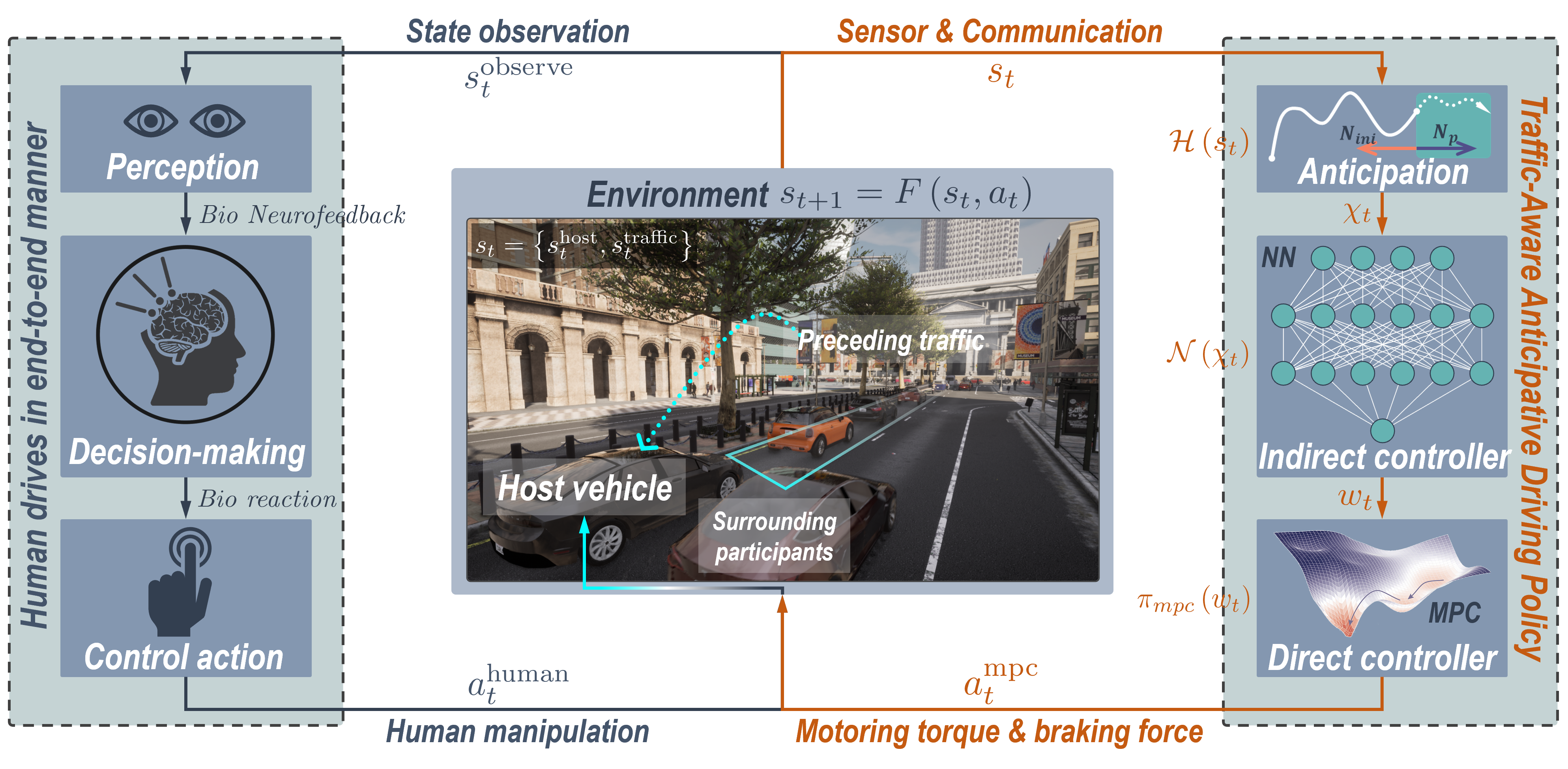
Role of the Human-in-the-Loop Driving Simulator: The human-in-the-loop driving simulator integrates various hardware components, such as a steering wheel, pedals, shifter, and cockpit, with advanced software like CARLA, an open-source autonomous driving simulator, or CarSim. This setup, as shown above, allows a human driver to interact with the simulation environment, providing real-time feedback on driving behaviors. The role of the simulator is to bridge the gap between human driving inputs and the response of autonomous driving systems, enabling the collection of detailed data on how different driving styles influence vehicle dynamics and energy consumption. By involving a human driver in the loop, the simulator can capture the nuances of natural driving behaviors, which are essential for developing more accurate and personalized motion control algorithms for energy-efficient driving.
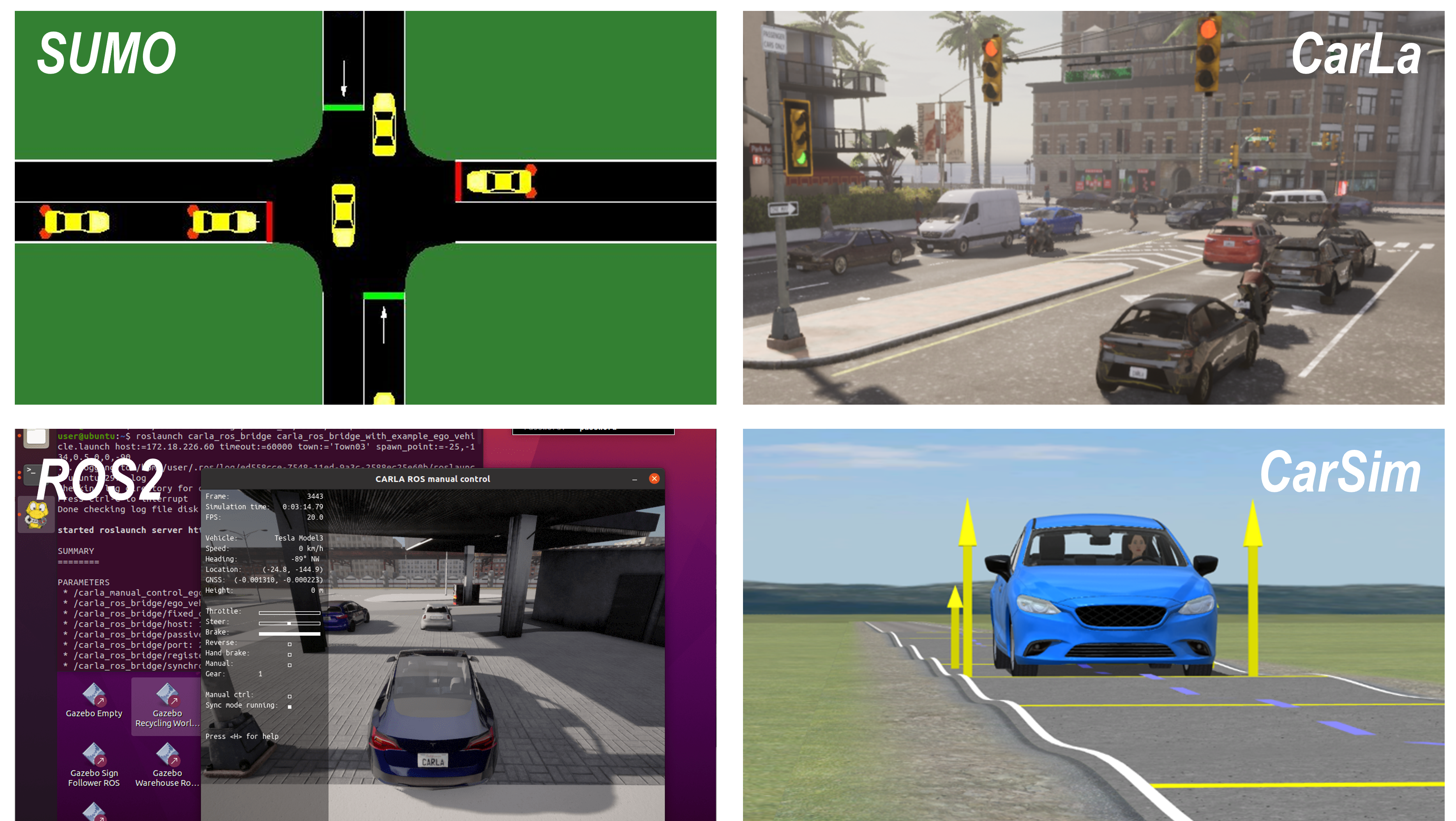
The leveraged software with the Driving Simulator mainly includes:
1. CarSim: Precise Vehicle Dynamics Simulation
2. CarLa: Realistic Human-Machine Interaction Interface
3. SUMO: Flexible Traffic Flow Simulation
4. ROS: Comprehensive Communication Interfaces
Based on the Human-in-the-Loop Driving Simulator Bench, the following research areas can be explored:
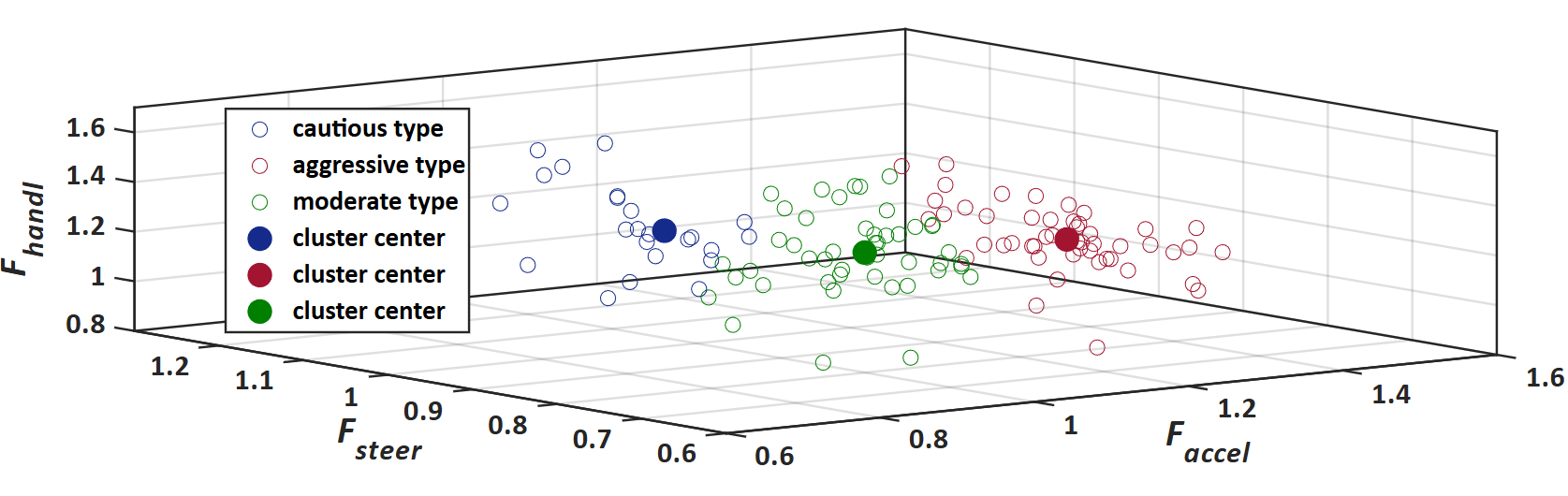
1. Driving Behavior Characterization and Modeling:
- The simulator can be used to collect data on driver behaviors in various scenarios, including acceleration, braking, and steering actions. This data allows for the analysis of driver response patterns and behavior characteristics. By applying machine learning and statistical modeling techniques, mathematical models of driving behavior can be developed. These models help understand the decision-making process of drivers, predict future behaviors, and inform the design of automated driving systems.
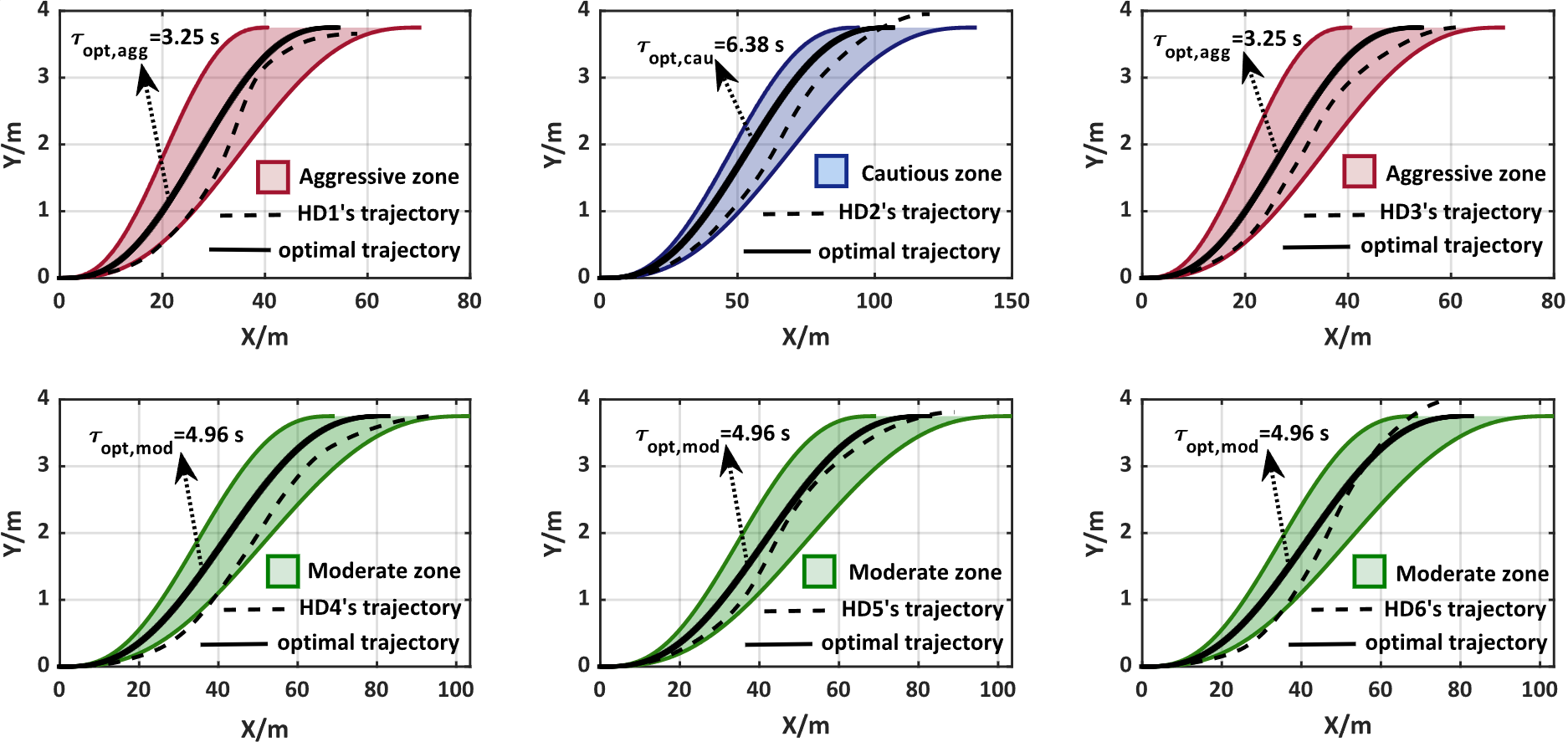
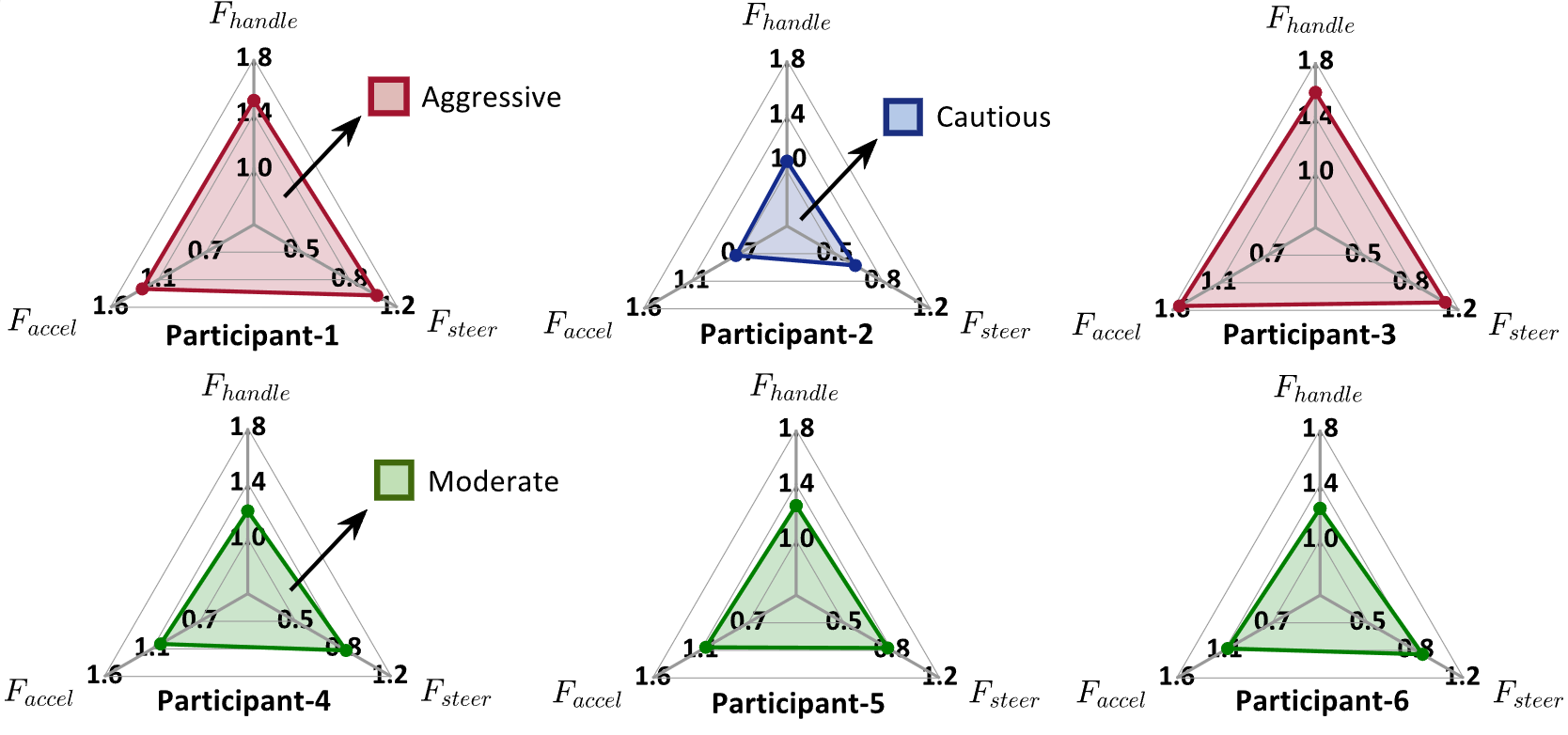
Adapted from our paper - Nie, Z., & Farzaneh, H. (2023). Energy-Efficient Lane-Change Motion Planning for Personalized Autonomous Driving. Applied Energy, 338, 120926. doi:10.1016/j.apenergy.2023.120926.
2. Human-Machine Cooperative Driving Control/Planning:
- Research can focus on developing control strategies and planning algorithms that enable effective cooperation between human drivers and automated driving systems. This includes exploring how to allocate driving tasks in specific scenarios, ensuring seamless handover between human and machine in emergency situations, and improving driving safety and comfort through cooperative control mechanisms.
3. Personalized Cruise Control Design:
- The simulator can be utilized to design personalized cruise control systems based on individual driving styles and preferences. By analyzing driving data, such as speed preferences and responses to various traffic conditions, cruise control algorithms can be tailored to meet the specific needs of individual drivers. This personalization enhances driving comfort and reduces driver fatigue.
Adapted from our paper - Nie, Z., & Farzaneh, H. (2024). Human-Inspired Anticipative Cruise Control for Enhancing Mixed Traffic Flow. IEEE Transactions on Intelligent Transportation Systems, (Early Access). doi:10.1109/TITS.2024.3438211.
4. Individualized Driving Data Collection:
- The simulator platform facilitates the collection of detailed and individualized driving data, including reaction times, operational habits, and emotional influences. This data can be used not only for driving behavior research but also for developing and validating personalized driver assistance systems, further advancing intelligent transportation systems.
Adapted from our paper - Nie, Z., & Farzaneh, H. (2023). Energy-Efficient Lane-Change Motion Planning for Personalized Autonomous Driving. Applied Energy, 338, 120926. doi:10.1016/j.apenergy.2023.120926.