
Background & Motivation:
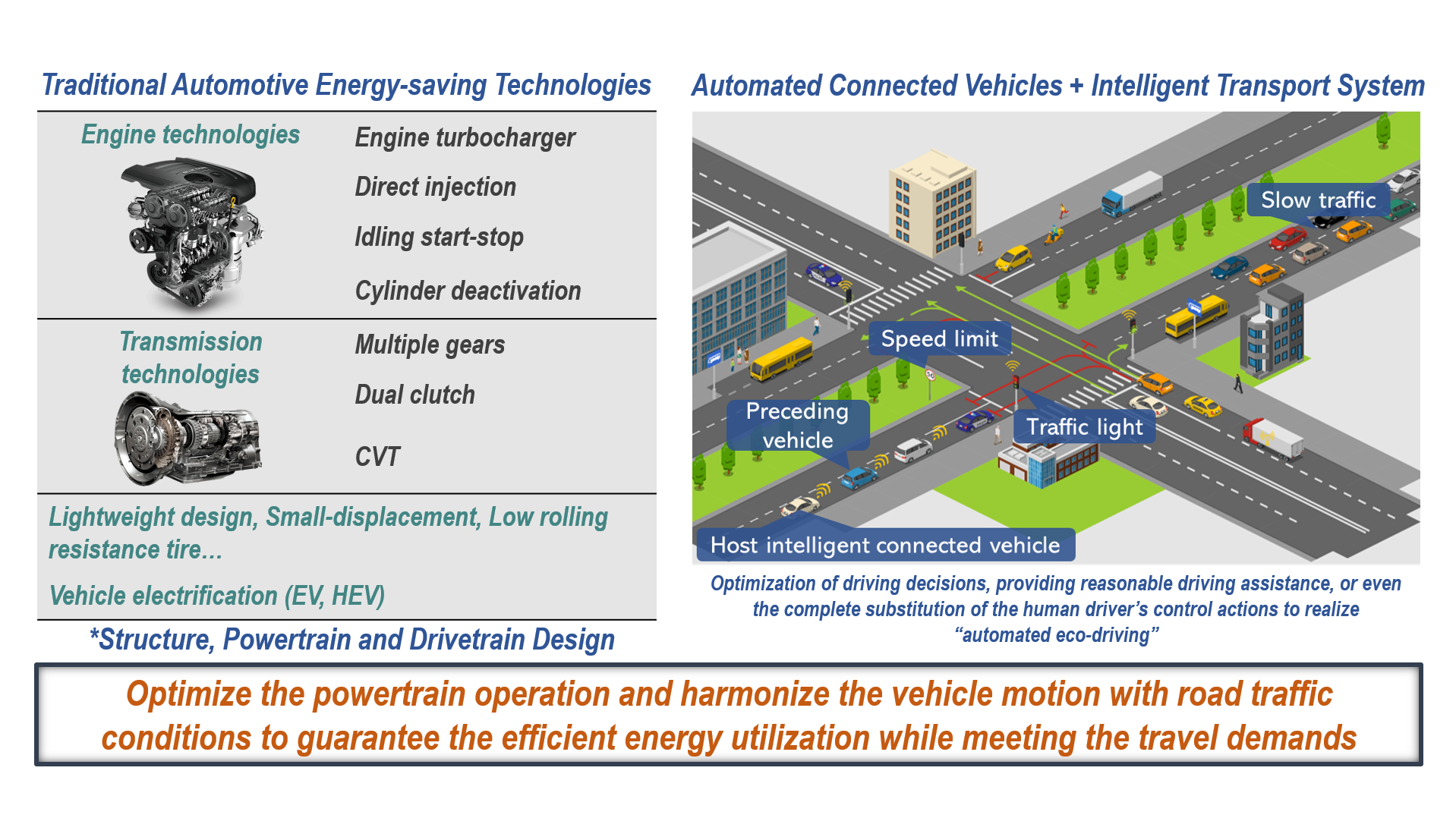
Traditional approaches to automotive energy efficiency have primarily focused on advancing internal engine technologies, optimizing transmission systems, and implementing vehicle lightweighting strategies. These solutions often necessitate fundamental alterations to the vehicle’s internal architecture. However, the advent of electrification and intelligent technologies introduces a paradigm shift. Connected and Automated Vehicles (CAVs), along with intelligent transportation systems, now offer unprecedented opportunities for developing the next generation of energy-efficient and decarbonized electric, connected, and autonomous vehicles. These technologies not only enhance the vehicle’s energy performance but also enable holistic optimization across transportation networks, contributing to sustainable mobility solutions on a broader scale.
The objective in this research stream of EES Lab is the optimization of driving decisions, providing reasonable driving assistance, or even the complete substitution of the human driver's control actions to realize automated eco-driving.
Specifically, the concept of Eco-Driving refers to: optimizing the powertrain operation and harmonizing the vehicle motion with road traffic conditions to guarantee the efficient energy utilization while meeting the travel demands.
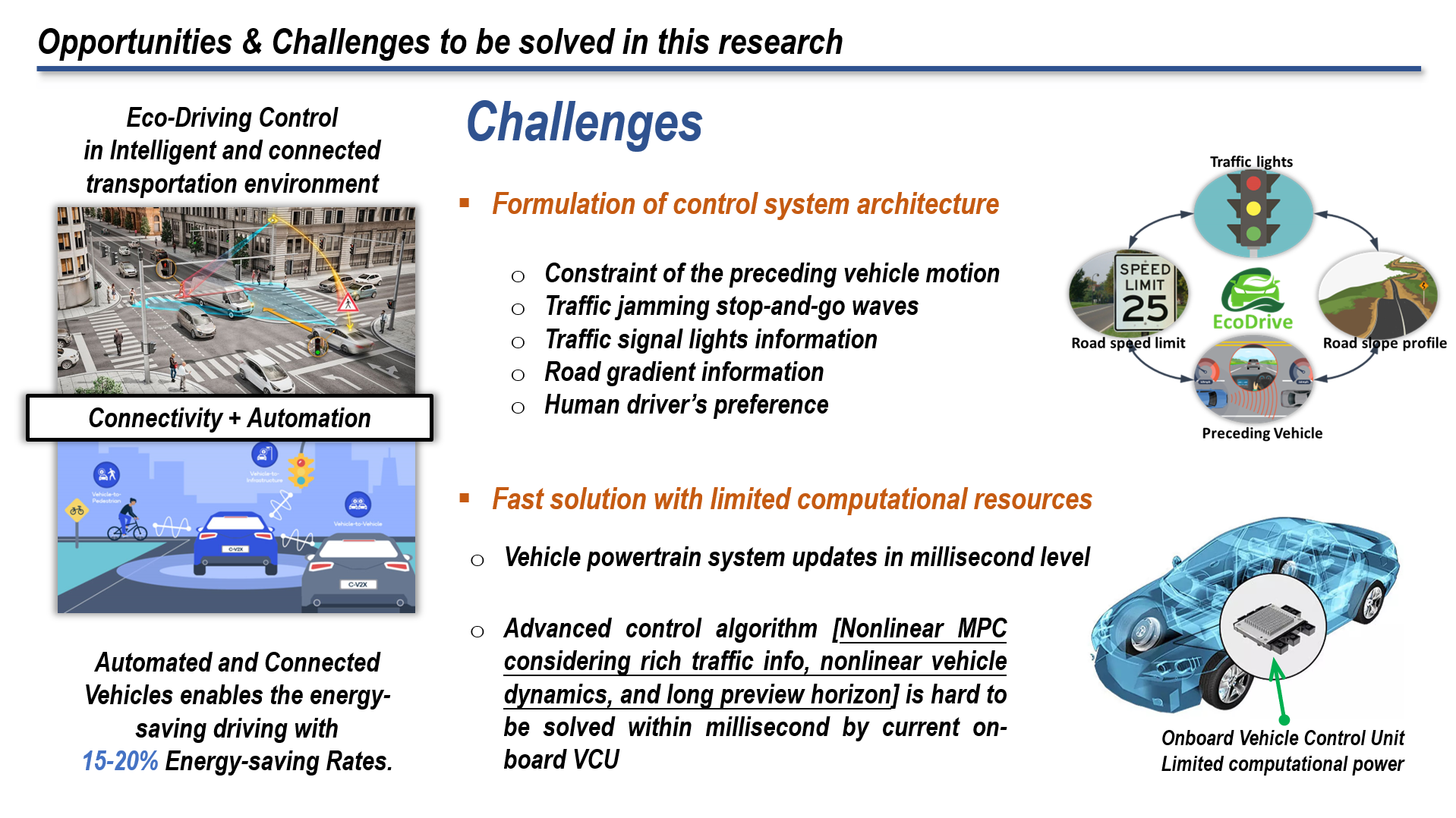
Challenges:
The main challenges in this research are highlighted as below:
Research Highlights:
More details can be accessed via 😃
#1. Real-Time Predictive Cruise Control for Eco-Driving
To address the energy-saving driving requirements in urban traffic environment, a real-implementable predictive cruise control (PCC) system consisting of dual model predictive controllers for electric vehicles (EVs) has been developed, as shown in the Figure below, considering constraints of surrounding traffic participants and upcoming traffic signal information. Our simulative experiments based on the real traffic data collected from urban area in Fukuoka, Japan, demonstrated the 8.5%~15.6% energy-saving performance of the proposed PCC system for EVs.
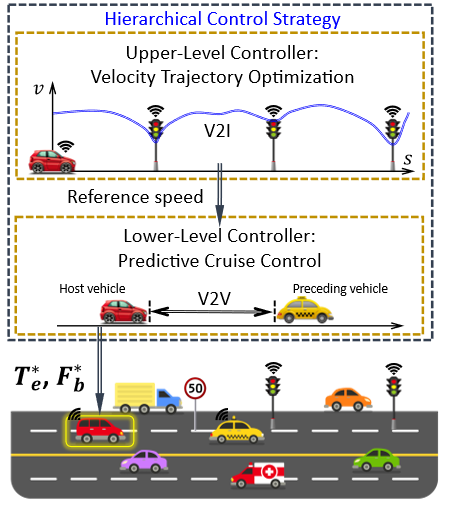
Adapted from our paper - Nie, Z., & Farzaneh, H. (2022). Real-Time Dynamic Predictive Cruise Control for Enhancing Eco-driving of Electric Vehicles Considering Traffic Constraints and Signal Phase and Timing (SPaT) Information. Energy, 241, 122888. doi:10.1016/j.energy.2021.122888.
#2. Energy-Efficient Lane-Change Motion Planning for Personalized Autonomous Driving
With the aim of realizing energy-efficient, personalized, and safe mobility, a novel lane-changing motion planning strategy for personalized energy-efficient autonomous driving has been proposed, as shown in the Figure below. In this work, the resulting nonlinear model predictive control strategy was solved through parallel computing for real-time implementation. And we took the lead in tackling eco-driving in the lane-changing scenario while considering the features of human driving styles.
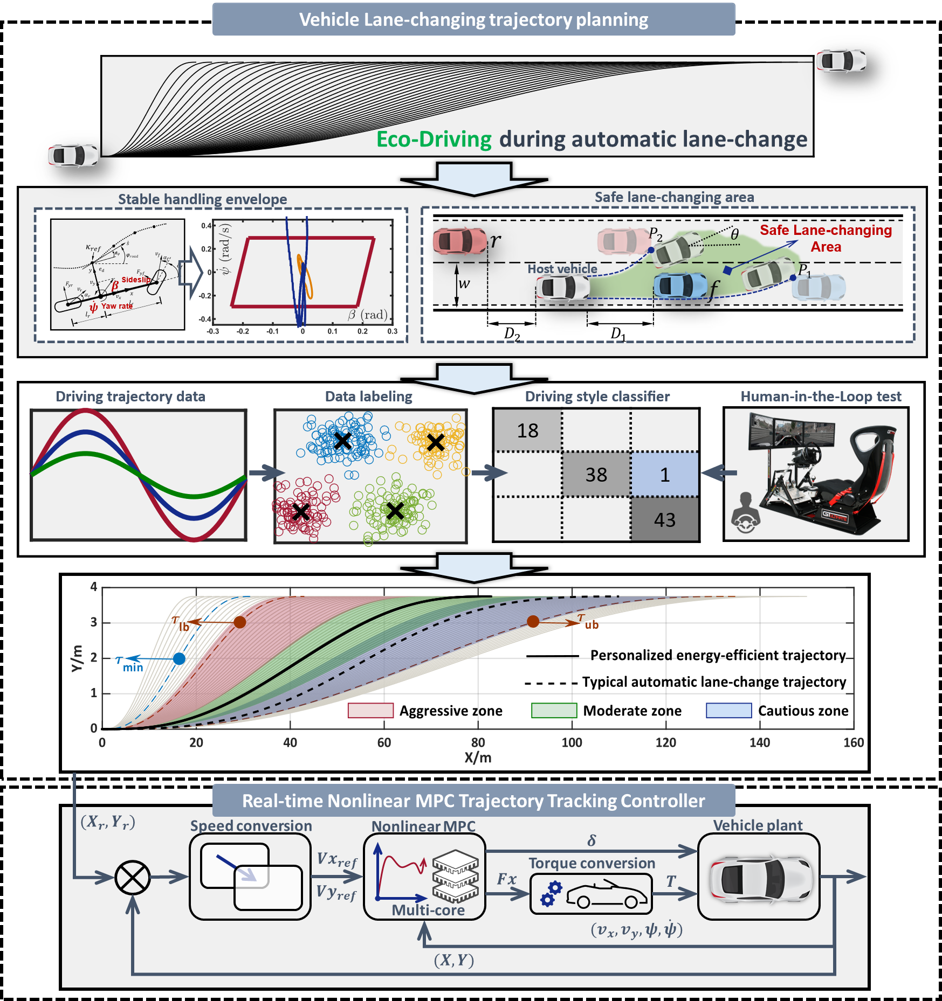
Adapted from our paper - Nie, Z., & Farzaneh, H. (2023). Energy-Efficient Lane-Change Motion Planning for Personalized Autonomous Driving. Applied Energy, 338, 120926. doi:10.1016/j.apenergy.2023.120926.
#3. Human-Inspired Anticipative Cruise Control System
A real-implementable human-inspired anticipative cruise control strategy for connected and automated vehicles (CAVs) has been proposed, as shown in following Figure, to align with the reactive driving preferences demonstrated by human drivers while leveraging their anticipative capabilities to enhance the overall traffic energy and efficiency in a mixed traffic flow. Our results indicate that the whole traffic flow energy economy can be improved by 4.58% by leveraging one individual CAV.
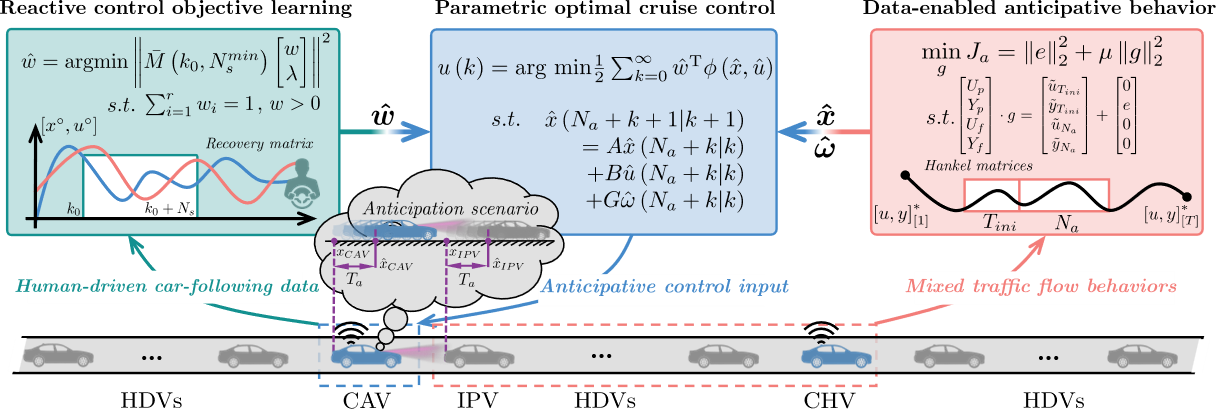
Adapted from our paper - Nie, Z., & Farzaneh, H. (2024). Human-Inspired Anticipative Cruise Control for Enhancing Mixed Traffic Flow. IEEE Transactions on Intelligent Transportation Systems, (Early Access). doi:10.1109/TITS.2024.3438211.